Presentació del projecte de fi de curs del Taller de Robòtica LEGO Bogatell-Icària extraescolar
17-06-11
El projecte final de curs de l'activitat extraescolar d'iniciació a la robòtica educativa i a la programació de robots autònoms del Taller de Robòtica LEGO Bogatell-Icària va consistir en dissenyar un recorregut amb diferents alçades on 3 robots han de transportar i lliurar-se una pilota. Al menys un robot ha de pujar una rampa de 25 graus d'inclinació, la qual cosa implica reduir la potència dels motors mitjançant engranatges. Els robots han de seguir o rastrejar una línia i han d'utilitzar sensors per esbrinar quan han arribat al seu objectiu. Cada robot ha de tenir o bé una pinça per agafar la pilota, o bé una cassoleta per transportar-la. Cada grup d'alumnes dissenya un robot en equip i tots els equips han de posar-se d'acord per tal de seguir una estratègia de disseny i programació que permeti realitzar tot l'exercici amb èxit. L'èxit depèn del bon funcionament de tot el grup. Com es pot veure en les fotos, un robot ha d'agafar una pilota que ha de portar per una rampa i deixar-la caure dins la cassoleta d'un segon robot que l'ha de portar cap a un tercer que l'agafarà a nivell de terra per portar-la un altre cop al primer robot. L'exercici és un bucle sense fi que activa l'enginy de la tirolina.
Aquest exercici de fi de curs, presentat pels alumnes del taller durant la festa de fi de curs a l'Escola Bogatell, permet als alumnes treballar en equip i aplicar i fer una síntesi del que han aprés durant el curs d'iniciació, tant a nivell de programació com a nivell de construcció d'estructures, mecanismes i articulacions. La utilització de sensors de llum permet diferenciar colors i rastrejar una línia per conduir el robot al seu objectiu. Dos robots tenen un sol sensor de llum i un robot compte amb dos sensors amb un algoritme una mica més complex, que li permet saber quan ha arribat al seu objectiu. Els sensors de tacte permeten als robots detectar un altre robot per lliurar la pilota. Els sensors ultrasònics permeten detectar la distància a altres robots i objectes propers, com la pròpia pilota, per tal d'esbrinar si han arribat al seu objectiu o si ja tenen la pilota. Finalment, el sensor de so permet arrancar tot l'exercici des de la tirolina.
Volem agraïr les fotos a l'Andrés pare d'en Beltran.
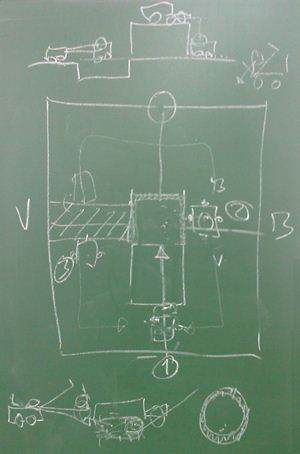
Disseny del repte amb guix sobre la pissarra
Aquest exercici de fi de curs, presentat pels alumnes del taller durant la festa de fi de curs a l'Escola Bogatell, permet als alumnes treballar en equip i aplicar i fer una síntesi del que han aprés durant el curs d'iniciació, tant a nivell de programació com a nivell de construcció d'estructures, mecanismes i articulacions. La utilització de sensors de llum permet diferenciar colors i rastrejar una línia per conduir el robot al seu objectiu. Dos robots tenen un sol sensor de llum i un robot compte amb dos sensors amb un algoritme una mica més complex, que li permet saber quan ha arribat al seu objectiu. Els sensors de tacte permeten als robots detectar un altre robot per lliurar la pilota. Els sensors ultrasònics permeten detectar la distància a altres robots i objectes propers, com la pròpia pilota, per tal d'esbrinar si han arribat al seu objectiu o si ja tenen la pilota. Finalment, el sensor de so permet arrancar tot l'exercici des de la tirolina.
Volem agraïr les fotos a l'Andrés pare d'en Beltran.
Disseny del repte amb guix sobre la pissarra